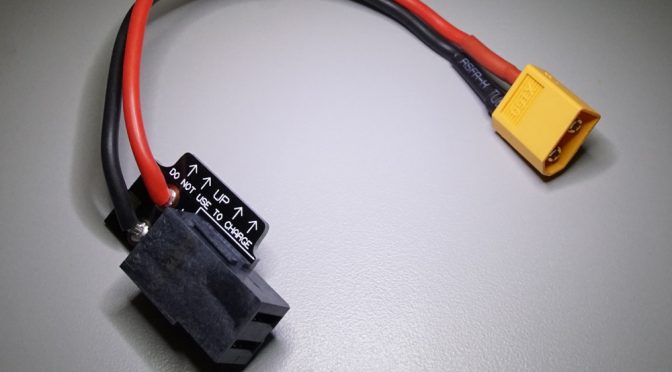
For a project we’re working on, we bought a bunch of connectors for the 3DR Solo Battery Power contacts (we don’t need the signal portion). Since the minimum order quantity was larger than we needed, we figured we would create a carrier PCB and maybe some other Solo owners would be interested.
The carrier board takes an XT-60 connector for a standard LiPo and connects it to the Solo’s power contacts.
Since we didn’t buy the version with the signal contacts, the Solo will NOT be able to read voltage, current, % battery remaining, etc., and will not be able to initiate an RTL when the battery reaches a critical level. Because of this, you should use a low voltage alarm and time your flights (if you fly with this module). The store page has links to low voltage alarms and batteries that can be used with the Solo.
BIG IMPORTANT INFORMATION:
The Green Cube (or a stock cube with upgraded ArduCopter) with Arducopter 3.5.4 (and likely other recent versions) will yell at you if you use this module! The low battery alarm will continuously go off (unless you change parameters, which we don’t recommend, therefore we’re not going to tell you how to do it). We’re sorry – this product was never meant to be a perfect replacement for the smart battery.
A stock Solo cube with stock Solo firmware (2.4.2), or a stock Solo cube with OpenSolo (2.5-RC3), will not give the low voltage alarm, no parameter changes needed (just, to reiterate, it still won’t show you the voltage/current/% remaining, etc when using this module, but if you switch back to a smart battery, you will get that information).
Further, you must use the left stick to arm the Solo. Pressing/holding the ‘Fly’ button will not work with this module: you need to bring the left stick down&right to arm, and then bring the throttle up to take-off:
So just to be clear:
- Stock Solo cube with stock Solo firmware (2.4.2) = No battery telemetry, but if the Solo cannot get the battery status, it doesn’t output a low voltage alarm (so you can swap from this module and a smart battery, and still get battery information [and failsafes] with the smart battery, no parameter changes necessary). You must use the left stick to arm and takeoff.
- Stock Solo cube with OpenSolo (2.5-RC3) = No battery telemetry, but if the Solo cannot get the battery status, it doesn’t output a low voltage alarm (so you can swap from this module and a smart battery, and still get battery information [and failsafes] with the smart battery, no parameter changes necessary). You must use the left stick to arm and takeoff.
- Green Cube (or a stock cube with upgraded ArduCopter) = continuous low voltage alarm since it cannot get battery status. You must change parameters to disable this (but it also disables getting battery status when using a smart battery, so we’re not going to support this)
One last caveat here is that you can’t use this module with the Solo battery charger to charge a standard LiPo battery. The Solo smart batteries have certain protections built-in, standard LiPos do not.
Files
Since we’re mainly just trying to get rid of excess stock and hopefully help out some Solo-ers at the same time, we’re opening up the files for the carrier board we’re selling. Here are all the files for the PCB (gerbers, schematics, layouts, and source project file [you can only open if you have Proteus]): https://drive.google.com/drive
Please note that per the Molex datasheet, the press-fit connector we sell requires at least a 1.6mm thick PCB, and we highly recommend 2oz copper, to alleviate any issues with heat on the current-carrying traces on the PCB.
Where to buy?
Even with all those caveats and disclaimers you still want to buy this thing? Cool! Here’s where you can get it:
Leave a Reply